При сборке для мирового рекорда нужно достать кубик из робота, запутать его руками по алгоритму специальной верифицированной программы от World Cube Association и положить обратно. Затем робот запускается, а время измеряется с момента, когда он начинает видеть кубик, до момента завершения сборки.
Видео для рекорда записывают так, чтобы было понятно, что камеры заранее не видят кубик. Я делаю это с помощью подсветки: на камерах выставлены такие параметры, что без дополнительного света они ничего не различают. В момент начала сборки включается подсветка — и камеры начинают распознавать кубик, решая головоломку.
Кроме того, у меня на экране выводится время сканирования, решения и сборки. Время сборки отслеживается с помощью камеры замедленной съёмки. Время сканирования и решения чётко и формально описаны, можно посмотреть на частоту кадров в секунду у используемых мной камер. Также можно увидеть, что время решения кубика тоже реалистичное. Я пользуюсь определённым решателем, и на GitHub можно посмотреть, что он действительно так быстро работает.
Есть камеры, которые позволяют снимать со скоростью 1 мс. Приятно думать, как (и насколько) можно улучшить машину с такими камерами!
Но с сокращением времени на сканирование может сильно возрасти стоимость оборудования. Камера захочет передать картинку на компьютер не по USB или интернет-кабелю, а по очень быстрому протоколу. Такое решение стоит дорого. Если сейчас сканирование за 10 мс обходится в 800 ₽, то при более крутом оборудовании это может обойтись в тысячи долларов.
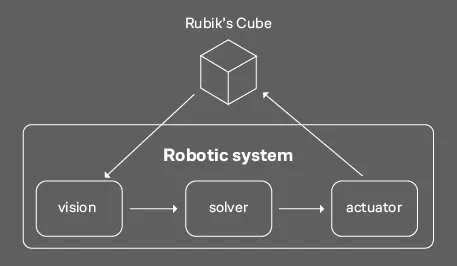
Когда кубик отсканирован, он уже находится в одном из 43 квинтиллионов состояний — и нужно как-то привести его к одному решённому. Здесь помогает двухфазный алгоритм Коцембы. Ускорять его можно, но для этого нужно больше вычислительных мощностей.